Automatically Created HMI for Modular Robotics
- Subject:Cyber-Physical Robotics
- Type:Bachelorthesis
- Date:ASAP
- Supervisor:
- Links:Tender
-
This thesis aims to implement automatic HMI generation for modular robotic
systems
Motivation
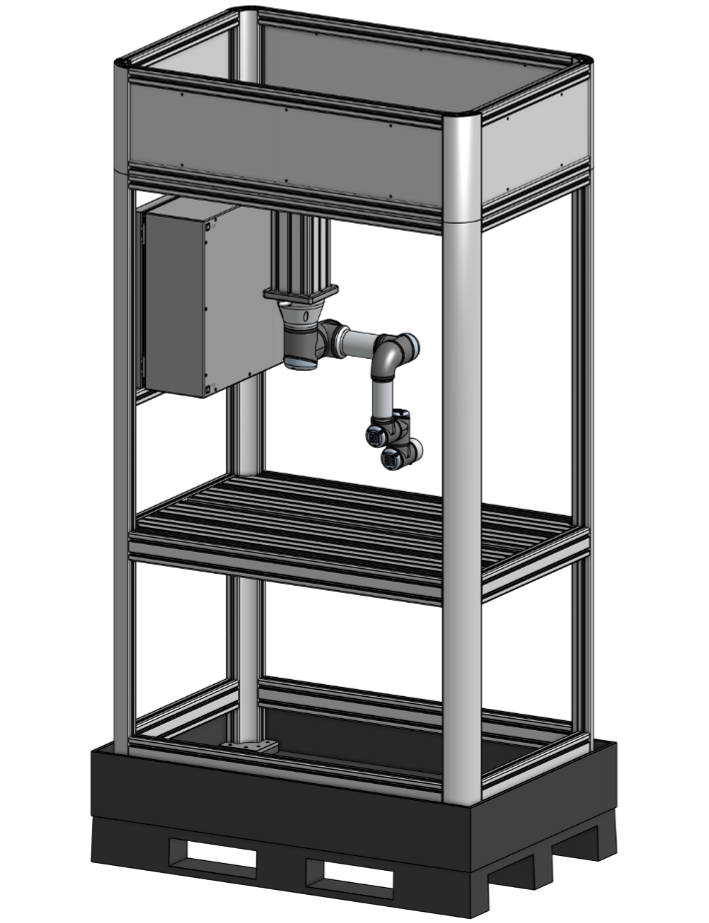
In today’s fast-paced manufacturing environment, modular robotics offer a
compelling solution to address the challenges of short production life cycles
and increasing product variations. These adaptable systems can be quickly
reconfigured to accommodate new designs and production requirements, significantly
reducing downtime and enhancing flexibility.
However, the complexity of combining different robot modules necessitates an
advanced Human-Machine Interface (HMI) that can be automatically created
to ensure seamless operation and integration. The automatic generation
of HMIs is crucial for managing the intricate interactions between modules,
allowing operators to monitor and control systems with ease. This approach
minimizes the manual effort required to design and update HMIs, reducing the
potential for errors.
Aims
The aim of this thesis is to conduct an analysis of current Human-Machine
Interface (HMI) methods and implement an automatically created HMI for
modular robot systems. This implementation will utilize the Robot Operating
System 2 (ROS2) and RViz within a server-client infrastructure.
Helpful prior knowledge
- Knowledge about robotic systems
- Knowledge about ROS2 and RViz
- Lecture Cyber-Physical Production Systems