Delta Robot ROS2 controller implementation
- Forschungsthema:Cyber-Physical Robotics
- Typ:Bachelorthesis
- Datum:ASAP
- Betreuung:
- Links:Tender
-
During this thesis, a ROS2 based controller will be implemented
for a parallel robot.
Motivation
Robots are increasingly important for the manufacturing of goods. Specifically
articulated robots are used for their flexibility. These robots have a simple serial
kinematic chain. Next to articulated robots, also robots with parallel kinematic
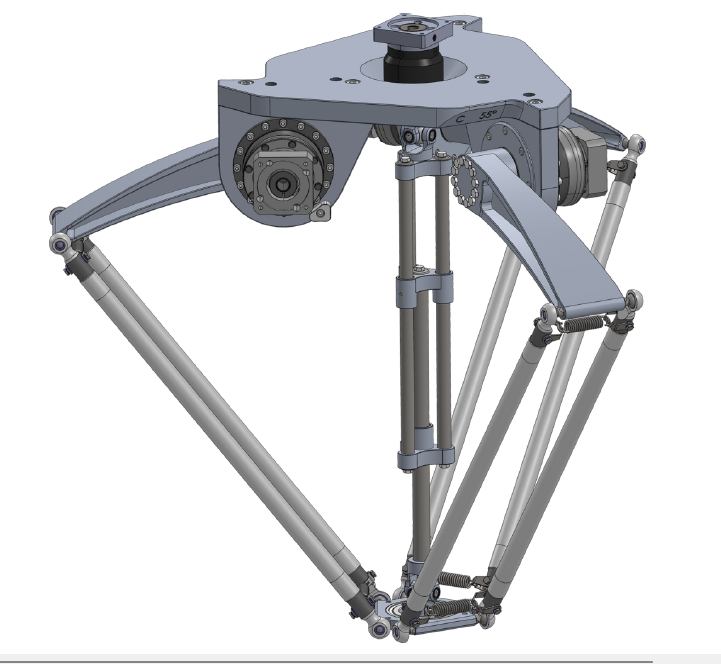
chains are in use. This includes the delta robot. A delta robot consists of three
parallel articulated arms, connected to an end effector plate. Due to their unique
characteristics and low price, they are often used in pick and place tasks. To integrate
a robot into an environment, the API provided by the robot manufacturer
must be used.
Goal
In order to utilize these robots within our lab a ROS2 controller needs to be designed.
For this, a gazebo based simulation of the robot must be implemented.
After implementing the ROS2 controller, the robot should be integrated into the
existing VR simulation environment.
Helpful prior knowledge
The subsequent prior knowledge is advantageous for the completion of the final
thesis:
• Robotics
• ROS2
• Gazebo
• Unity